OBD-II Server Stack
Overview
RAPIDSEA supports ISO15031 protocol as explained in the ISO15031 - OBD Protocol page. This page explains the server architecture and details how the user should interface the stack with their custom logic and realize the ECU implementation quickly. It also provides guidelines on adopting the stack for different systems.
The below diagram captures the block level diagram of the DoCAN OBD server and how it interfaces with other modules.
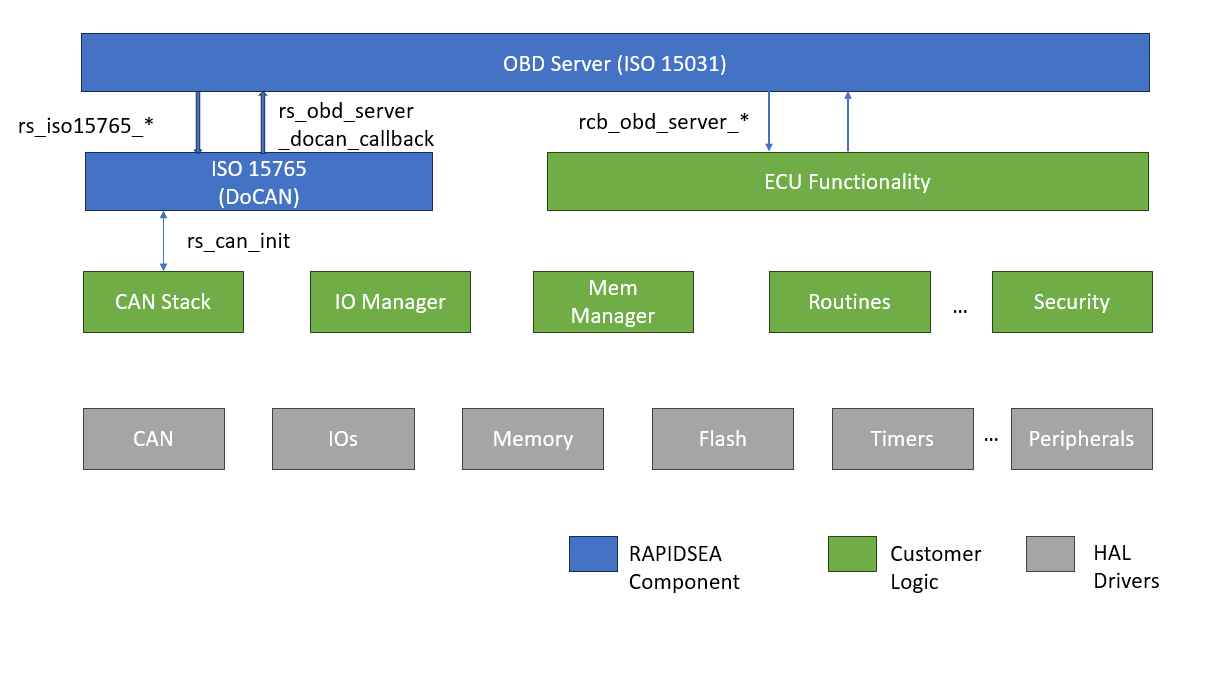
DoCAN Interface
The OBD server communicates over the CAN network through the underlying DoCAN stack (ISO15765). This DoCAN stack is also available as part of the RAPIDSEA components. All the functions that are needed are available as part of the DoCAN stack and has to be compiled together.
Mode |
Description |
|---|---|
rs_iso15765_* |
Set of functions called by OBD server to perform operation such as initialize, transmit messages etc |
rs_obd_server_docan_callback |
Callback function called by the DoCAN layer to inform of Data Indication, error etc |
These details with respect to the DoCAN interface are covered in detail in the ISO15765 - DoCAN Protocol page.
Application Interface
While the RAPIDSEA OBD server stack can handle most of the functionality such as message validation, session management, timing control etc, the business logic has to implement the application functionality. the RAPIDSEA OBD server clearly defines API and callback functions that are essential for the user to use/implement.
The below table captures the function that are to be called from the application logic.
Function |
Description |
|---|---|
rs_obd_server_open |
To initialize the OBD server stack |
rs_obd_server_set_p2_timing |
To setup the P2 timing associated with the server |
rs_obd_server_process |
To be called periodically to process the incoming/outgoing messages |
There are many functions through which the OBD server stack retrieves information from the application logic or indicate actions to be performed. These functions are captured in the below table.
Function |
Description |
|---|---|
rcb_obd_server_01h_req_current_diag_data |
Called to indicate request Current Diagnostic Data |
rcb_obd_server_02h_request_freeze_frame_data |
Called to indicate request Freeze Frame Data |
rcb_obd_server_03h_req_diag_trouble_code |
Called to indicate request Diagnostic Trouble Codes |
rcb_obd_server_04h_clear_dtc |
Called to Clear/Reset Diagnostic Trouble Codes and information |
rcb_obd_server_05h_req_oxygen_sensor_monitoring |
Called to indicate request Oxygen Sensor Monitoring Test Results |
rcb_obd_server_06h_req_on_board_monitoring |
Called to indicate request On-Board Monitoring Test Results for Specific Monitored Systems |
rcb_obd_server_07h_req_emission_diag_trouble_code |
Called to indicate request Emission-Related Diagnostic Trouble Codes Detected During Current or Last Completed Driving Cycle |
rcb_obd_server_08h_req_ctrl_of_on_board_system |
Called to indicate request Control of On-Board System, Test or Component |
rcb_obd_server_09h_req_vehicle_information |
Called to indicate request vehicle information |
These functions are documented in detail in the below sections. It is important for the server to implement these functions correct for proper operation of the system.
Implementation Guide
This section explains how the OBD server can be implemented using the RAPIDSEA stack. Whether the stack is available in source form or in binary form, the steps to be followed are
Implement the Callback functions mentioned above
Implement the underlying rs_can_* functions for DoCAN as per the underlying hardware design as described in the CAN Interface page.
Initialize the buffers necessary for the operation
Initialize the CAN, ISO15765 and ISO15031 stack function for DoCAN.
Periodically call the process functions so that internal timeouts are handled.
High level flow chart is depicted below for DoCAN:
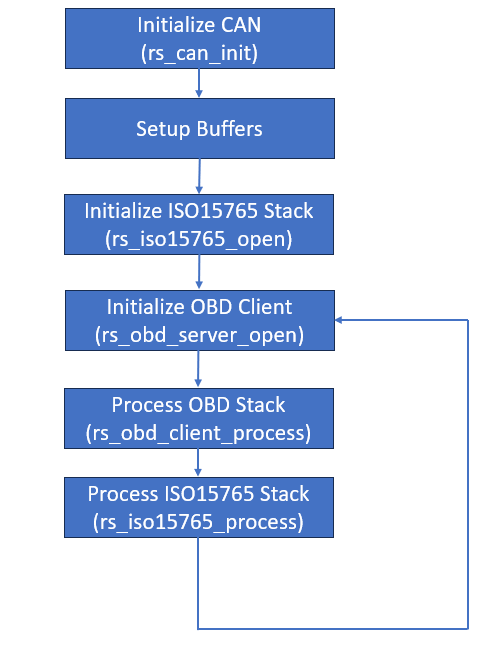
This can be implemented in a bare-metal system or over RTOS or over full fledged OS such as Linux etc.
Dependency
This stack depends on the below RAPIDSEA interfaces that can be obtained or custom implemented.
Example demo
An example implementation is available along with the release and is described in DoCAN OBD-II Server Demo.
OBD Header Details
Documentation from the relevant header as follows:
ISO15031 OBD Server Module.
This file contains the APIs for using ISO15031 defined obd server module
- Author
Embien RAPIDSEA Team
- Copyright
Embien Technologies India Pvt. Ltd.
Defines
-
RS_OBD_SERVER_MAX_NUM_RX_MSGS
Number of receive messages that can be buffered during reception.
Typedefs
-
typedef struct tag_rs_obd_server_config rs_obd_server_config_t
Contains information about server configuration.
-
typedef struct tag_rs_obd_server_instance rs_obd_server_instance_t
Contains information about server instance.
Functions
-
rs_handle_t rs_obd_server_open(rs_obd_server_instance_t *ptr_instance, rs_obd_server_config_t *ptr_config)
Initializes the obd server stack.
This function initializes the obd stack for server operation
- Parameters:
ptr_instance – [in] - Pointer to the OBD server instance information
ptr_config – [in] - Pointer to the OBD server configuration
- Returns:
Handle of the OBD server instance information which include configuration information also
-
rs_ret_val_t rs_obd_server_process(rs_handle_t obd_server_handle)
Function to be called periodically to process underlying obd server state machines.
This function is to be called at not more than 5 ms interval
- Parameters:
obd_server_handle – [in] - Handle to the OBD server instance
- Returns:
None
-
rs_ret_val_t rs_obd_server_set_p2_timing(rs_obd_server_config_t *ptr_config, uint16_t u16_p2_server, uint16_t u16_p2_ext_server)
Configures the obd server stack P2 timings.
This function sets the P2 timings for the obd server stack
- Parameters:
ptr_config – [in] - Pointer to the obd server configuration
u16_p2_server – [in] - P2 server time
u16_p2_ext_server – [in] - P2 extended server time
- Returns:
Return code
-
rs_ret_val_t rcb_obd_server_01h_req_current_diag_data(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_resp_data, uint8_t *ptr_resp_len)
-
rs_ret_val_t rcb_obd_server_02h_request_freeze_frame_data(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_resp_data, uint8_t *ptr_resp_len)
-
rs_ret_val_t rcb_obd_server_03h_req_diag_trouble_code(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_resp_data, uint8_t *ptr_resp_len)
-
rs_ret_val_t rcb_obd_server_04h_clear_dtc(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_resp_data, uint8_t *ptr_resp_len)
-
rs_ret_val_t rcb_obd_server_05h_req_oxygen_sensor_monitoring(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_resp_data, uint8_t *ptr_resp_len)
-
rs_ret_val_t rcb_obd_server_06h_req_on_board_monitoring(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_resp_data, uint8_t *ptr_resp_len)
-
rs_ret_val_t rcb_obd_server_07h_req_emission_diag_trouble_code(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_resp_data, uint8_t *ptr_resp_len)
-
rs_ret_val_t rcb_obd_server_08h_req_ctrl_of_on_board_system(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_resp_data, uint8_t *ptr_resp_len)
-
rs_ret_val_t rcb_obd_server_09h_req_vehicle_information(rs_handle_t obd_server_handle, uint8_t u8_pid_num, uint8_t *ptr_data, uint16_t *ptr_data_len)
Request the vehicle information.
This function Request the vehicle information
- Parameters:
obd_server_handle – [in] - Handle to the OBD server instance
u8_pid_num – [in] - Requested PID number
ptr_resp_data – [out] - Pointer to response buffer
ptr_resp_len – [out] - Pointer to response length
- Returns:
Return 0 on success or error code on failure
-
rs_ret_val_t rs_obd_server_close(rs_handle_t obd_handle)
Function to free the OBD handle.
This function used to free the OBD handle
- Parameters:
obd_handle – [in] - Handle of the server instance information
- Returns:
Return 0 on success or error code on failure
-
struct tag_rs_obd_server_config
- #include <rs_obd_server.h>
Contains information about server configuration.
-
struct tag_rs_obd_server_instance
- #include <rs_obd_server.h>
Contains information about server instance.
Public Members
-
rs_handle_t tp_handle
Transport Handle with corresponding type (DoIP/ DoCAN)
-
rs_obd_server_config_t *ptr_obd_server_config
Contains information about server configuration.
-
rs_buffer_mgr_t rx_msg_mgr
RX message FIFO.
-
void *arr_rx_msgs[RS_OBD_SERVER_MAX_NUM_RX_MSGS]
Pointer array to hold incoming messages.
-
rs_search_mgr_t si_search_mgr
Search manager for service handlers lookup.
-
rs_an_tp_msg_t *ptr_cur_proc_msg
For P2 handling.
-
uint32_t last_active_time
Session activity timer.
-
uint32_t last_resp_time
Time last resp was sent to track P2.
-
uint8_t extend_timing
P2 Extension mode.
-
rs_handle_t tp_handle