In the world of embedded systems, stepper motors are a cornerstone for applications requiring precise positioning and reliable motion control. From robotics and CNC machines to 3D printers and industrial automation, stepper motors deliver unmatched accuracy without the need for complex feedback systems. Let us explore the intricacies of stepper motor control, including their operating principles, modes, acceleration/deceleration profiles, and the critical role of a Stepper Motor Manager in optimizing performance. This article is tailored for embedded system developers looking to harness the power of stepper motors in their projects, with a focus on practical implementation using tools like Embien’s RAPIDSEA Suite.
Operating Principles of Stepper Motors
A stepper motor is a brushless DC electric motor that rotates in discrete steps, converting electrical pulses into precise mechanical movements. Unlike traditional motors that rotate continuously, stepper motors move in fixed angular increments, or “steps,” making them ideal for open-loop control systems where position accuracy is paramount. The core components of a stepper motor include a rotor (either a permanent magnet or variable reluctance type) and a stator with electromagnetic coils. When the stator coils are energized in a specific sequence, they generate a magnetic field that aligns the rotor to predefined positions. Each pulse sent to the motor driver advances the rotor by one step, with the step angle determined by the motor’s design (e.g., 1.8° for 200 steps per revolution in a typical two-phase motor). This principle, rooted in Faraday’s law of magnetic induction, ensures precise control over position, speed, and direction without requiring position sensors.
Key Advantages for Embedded Systems
High Precision: Stepper motors offer non-cumulative positioning errors, typically within 3-5% of the step angle.
Open-Loop Control: No feedback is needed for most applications, reducing system complexity and cost.
High Torque at Low Speeds: Ideal for short-stroke positioning tasks in robotics and automation.
Challenges:
Resonance: At certain speeds, stepper motors can experience resonance, leading to vibrations or step loss.
Torque Drop at High Speeds: Inductance limits current flow at higher frequencies, reducing torque.
Operating Modes of Stepper Motors
Stepper motors can operate in various modes, each suited to specific application needs. Understanding these modes is crucial for embedded developers to optimize performance.
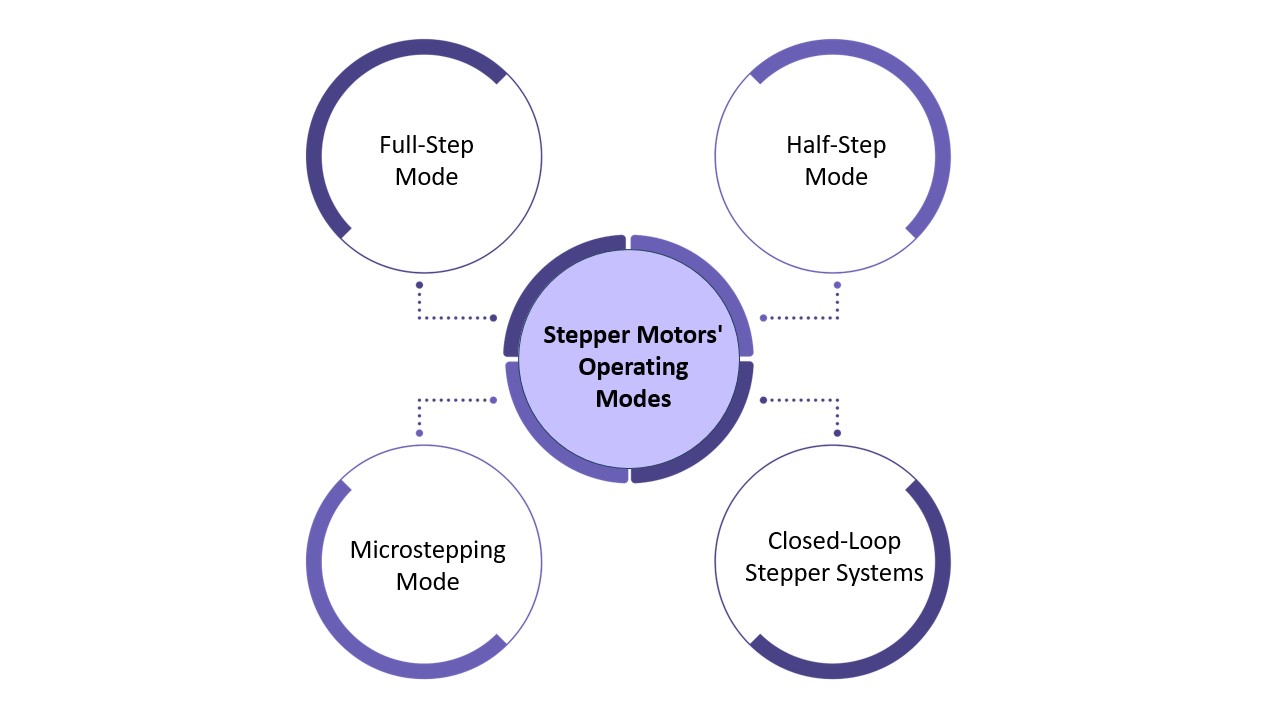
Full-Step Mode: In full-step mode, the motor advances by its full step angle (e.g., 1.8° for a 200-step motor) with each pulse. This mode provides maximum torque but can result in noticeable vibrations due to larger step increments.
Use Case: Applications requiring high torque, such as conveyor belt drives or heavy-duty positioning systems.
Half-Step Mode: Half-stepping alternates between energizing one and two phases, effectively doubling the resolution (e.g., 0.9° per step). This reduces vibrations and improves smoothness at the cost of slightly lower torque.
Use Case: CNC machines and 3D printers where smoother motion is critical.
Microstepping Mode: Microstepping divides each full step into smaller increments (e.g., 1/16 or 1/256 steps) by modulating the current in the stator coils. This enhances resolution, reduces resonance, and provides smoother operation, making it ideal for precision applications.
Use Case: Medical devices, camera positioning systems, and high-precision robotics.
Closed-Loop Stepper Systems: While stepper motors typically operate in open-loop mode, closed-loop systems incorporate encoders to monitor position and correct for step loss due to excessive loads or resonance. This mode bridges the gap between stepper and servo motor performance.
Use Case: High-torque applications with variable loads, such as industrial automation.
Acceleration and Deceleration Profiles
Effective stepper motor control requires careful management of acceleration and deceleration to prevent step loss and ensure smooth operation. Two primary motion profiles are used:
Constant Velocity (Rectangular) Motion Profile: In this mode, the motor instantly changes speed, suitable for applications within the motor’s self-starting range. It uses a constant pulse rate, making it simple but prone to synchronization loss if torque is insufficient.
Acceleration/Deceleration (Trapezoidal) Motion Profile: This profile gradually ramps up the pulse rate during acceleration and ramps it down during deceleration, expanding the motor’s operating range. It minimizes the risk of stalling and is ideal for applications requiring high speeds or heavy loads.
Key Considerations:
Resonance Management: Rapid acceleration through resonant speed ranges (e.g., 200 Hz for a 2-phase motor) reduces vibrations.
Torque Requirements: The pull-in torque (for starting/stopping) and pull-out torque (for sustained operation) must be considered to avoid step loss.
Real-Time Algorithms: Advanced algorithms, like those described in embedded systems literature, enable real-time calculation of acceleration profiles using fixed-point arithmetic on low-end microcontrollers.
The Role of a Stepper Motor Manager
In complex embedded applications, controlling multiple stepper motors with varying requirements (e.g., speed, torque, or resolution) demands a robust Stepper Motor Manager. This software or firmware module acts as a centralized controller, abstracting low-level driver interactions and enabling developers to focus on application logic.
Key Functions of a Stepper Motor Manager:
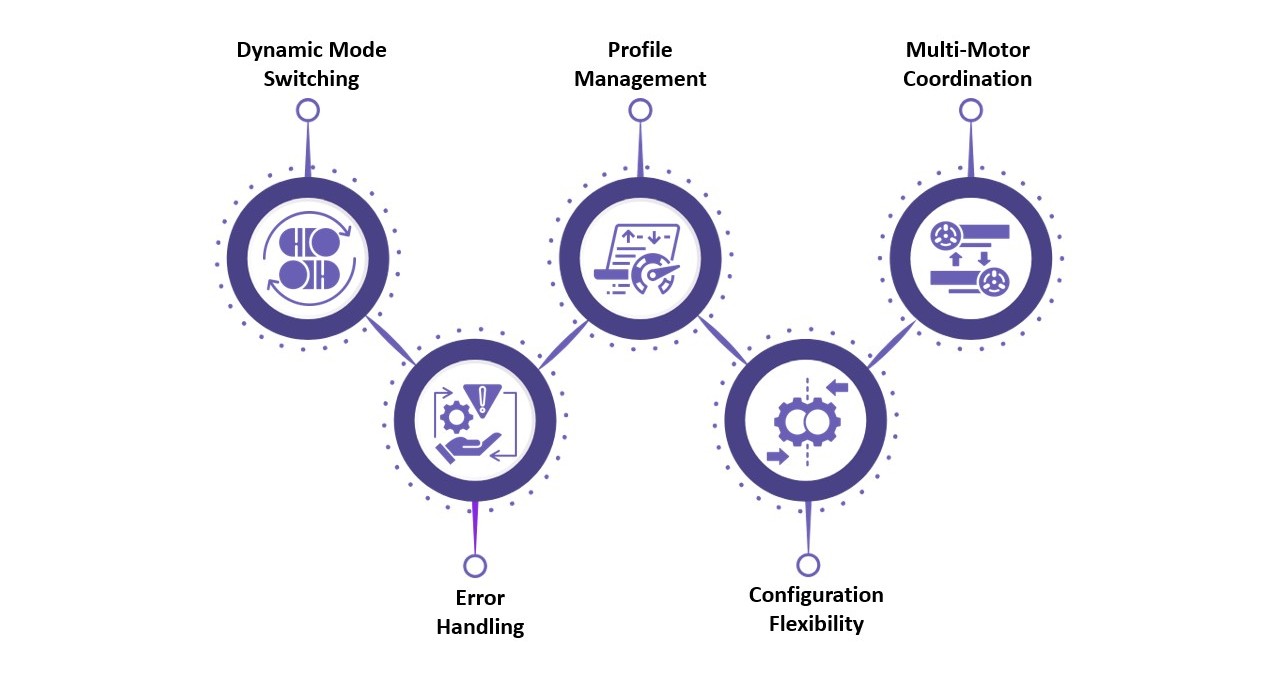
Dynamic Mode Switching: Seamlessly transitions between full-step, half-step, and microstepping modes based on application needs.
Profile Management: Implements acceleration/deceleration profiles to optimize performance and prevent step loss.
Multi-Motor Coordination: Synchronizes multiple stepper motors for applications like robotic arms or CNC systems.
Error Handling: Detects and mitigates issues like stalling or resonance, often integrating with closed-loop feedback when needed.
Configuration Flexibility: Allows developers to define step angles, pulse rates, and torque settings via high-level APIs.
A well-designed Stepper Motor Manager simplifies integration into embedded systems, reducing development time and ensuring reliability. For instance, in a 3D printer, the manager coordinates multiple motors for the X, Y, and Z axes, adjusting profiles dynamically to maintain precision during rapid movements.
Conclusion
Stepper motor control is a critical skill for embedded system developers, offering precise positioning and robust performance across diverse applications. By understanding the operating principles, mastering operating modes, and implementing effective acceleration/deceleration profiles, developers can unlock the full potential of stepper motors. A Stepper Motor Manager further streamlines development, providing flexibility and reliability in complex systems.
We empower developers with our RAPIDSEA Suite, a proven solution for stepper motor control and embedded product development. RAPIDSEA offers pre-built modules for mode switching, profile management, and multi-motor coordination, reducing time-to-market and ensuring robust performance. Explore our comprehensive documentation at RAPIDSEA Suite Documentation to integrate these capabilities into your next project. Whether you’re building robotics, automation systems, or precision instruments, RAPIDSEA Suite is your partner for seamless stepper motor control.